Closed loop response
Whenever you design a control system you will need to be able to predict the behavior of the system you design. There are a number of ways of predicting behavior, including using a simulation (in Simulink, for example, but any other simulator as well), using root locus or Bode' plot calculations, etc. However you do the prediction, you will need to have a model of the system. In many cases, the only way you can get a model is to take data on the system and try to fit a model to your data.
When you take data on a system, there are three choices.
Q1. With the step response graph in front of you consider this question.
Is the system first order, second order or some higher order system?
Now, let us assume - for the moment - that the system is second order. The reason for making that assumption is simple.
We will work first to determine the damping ratio. We know:
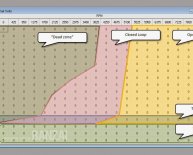
In particular, one measure of how the response decays is to look at the overshoot in the step response. As a system has more overshoot, that system has less decay per cycle (and that applies to the first cycle where the overshoot occurs) and is indicative of a smaller damping ratio. The link above will take you to an extended discussion of overshoot and damping ratio in second order systems, but the primary result is encapsulated in a plot of overshoot versus damping ratio. That plot is shown below. Now, let's go back to the problem at hand. You still need to get the system to behave. Can you think of a way to control this system? Try to answer this question before going on, even if your ideas do not correspond with the options below.Actually, we were trying to get you to the concept of ON-OFF Control. It's a common way of controlling things like temperature in your house. The essence of ON-OFF Control is to apply maximum control effort when the system is below where you want it to be, and minimum control effort when the system is above where you want it to be. In the home thermostat that means your thermostat turns the heat ON when the house is tool cold and it turns the heat OFF when the house is too warm.
In the simulator, we assume that the motor is driven by an amplifier that saturates in both directions. So, when the motor is going too slow, the simulator is max positive output - to increase the motor speed. When the motor is going too fast, the simulator is max negative output to make the motor start to slow down. Try that in the simulator. Do the following.
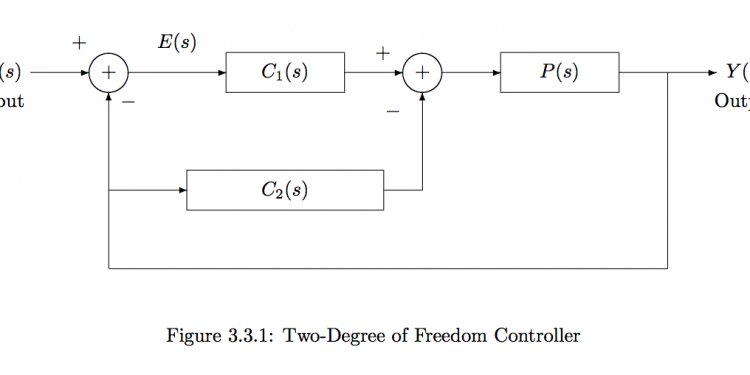
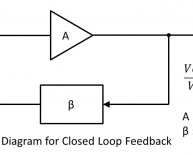
In the ON-OFF control system the system is represented pictorially with a block diagram that shows how signals flow within the system and how they are processed.
For an ON-OFF controller, the controller reacts to the error in the system. The error is the difference between what you want and what you have. The simplest ON-OFF controller is the home thermostat, which looks at the temperature you want, and the temperature it senses and turns the heating system ON or OFF, depending upon the error in the system. When the error is positive (i.e. the desired response is larger than the measured response) the controller turns the control effort to full ON. Otherwise, when the error is negative, the control effort is OFF. Some ON-OFF systems don't turn the control OFF when the error is negative. If the system is a motor, and you are trying to get to some predetermined speed, if you go past the desired speed, rather than turning the control effort to OFF, the control effort becomes that maximum possible negative control effort - which will tend to slow the motor down.
Now, it's time to examine what happens when you implement ON-OFF control. Our simulator will let us examine what happens.
Share this article
Related Posts

Latest Posts













